FEATURES
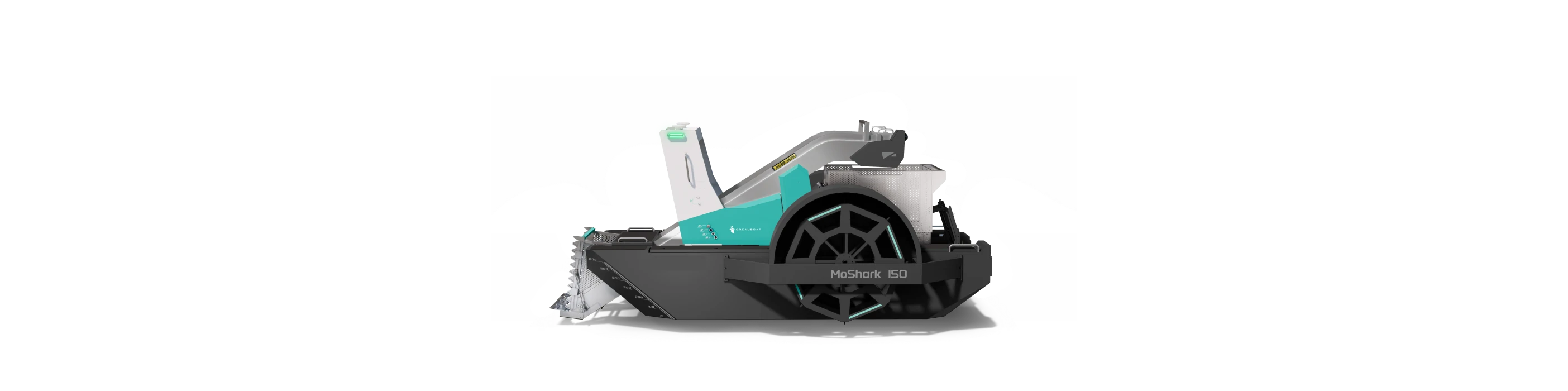
MOSHARK Unmanned Water Surface Mowing Robot
Agile and efficient aquatic waste collector for cleaner water bodies.
Unmanned driving:
24/7 response, automatic operation,
one-button start, the whole
process without worry
one-button start, the whole
process without worry
Adjustable harvesting depth:
the haresting depth is 10cm- 60cm, which can
be flexible adjusted to meet the demand
of water grass in low season.
be flexible adjusted to meet the demand
of water grass in low season.
Functional integration:
Harvesting garbage and grass at the same time,
both water surface cleaning and water quality
monitoring functions, multi-purpose boat.
both water surface cleaning and water quality
monitoring functions, multi-purpose boat.
Horizontal and vertical cutters:
The depth of the harvesting is adjustable
Garbage baskets automatic lifting:
The garbage baskets can be automatically lifted
reducing the difficuity of garbage dumping
reducing the difficuity of garbage dumping
Garbage weighting:
real-time statistics of garbage weight, convenient
transportation scheduling. harvest prediction, and
intelligent management.
transportation scheduling. harvest prediction, and
intelligent management.
Paddle wheel propulsion:
The paddle wheel propulsion system is adopted to avoid
water and grass entanglement and ensure smooth
operation.
water and grass entanglement and ensure smooth
operation.
Measurement:
4000*2500*1930mm
Weight:
800Kg
Battery:
48V,120Ah*2
Charging Time:
5-7h
Operation Speed:
0.8~1.5m/s
Maximum Speed:
1.5m/s
Endurance:
10h
Capacity:
150Kg
Communication Mode:
2.4GHz/4G/LTE
Draft:
0.4m
Minimum Working Depth:
0.8m
IP Level:
IP65
Power Plant:
1Kw*2
Anti-wave Level:
Gentle breeze,Slight
Body Material:
high-strength aluminum alloy
HIGHLIGHTS
Autonomous Navigation
Utilizes advanced AI algorithms to intelligently plan and follow optimal cleaning routes, covering even
complex waterways with precision.

Obstacle Avoidance
Equipped with cutting-edge sensors to detect and avoid obstacles in real time,
ensuring uninterrupted operations and protecting aquatic life.
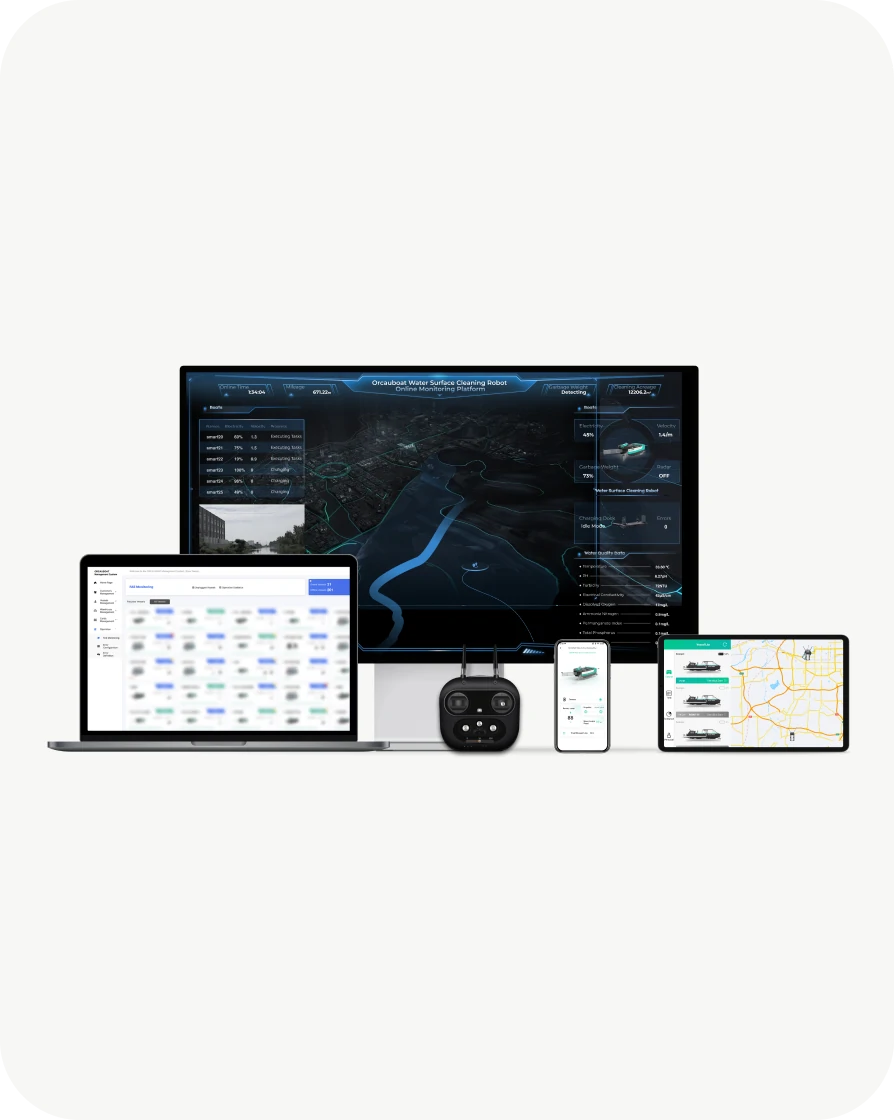
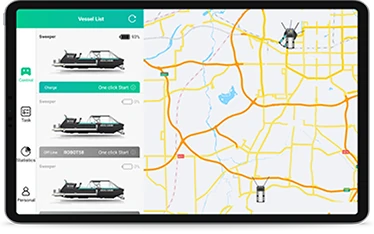
Seamless Connectivity
Offers real-time data transmission and remote monitoring, providing users with
full control and actionable performance insights.

Comprehensive Facility
A well-developed infrastructure solution that ensures a closed-loop cleaning
process, creating a more convenient workflow for workers.
FLEXIBLE MODELS


Manual Operations
For real-time adaptability, the manual model allows users to pilot SMURF directly. This flexibility ensures
precise navigation of water bodies, enabling targeted waste collection, data gathering, or other customized
tasks as situations demand.

Autonomous Operations
Designed for maximum efficiency, the autonomous model enables SMURF to operate seamlessly based on pre-set
mission routes. Users can define specific paths and operational tasks such as waste management, data
collection, or other intelligent functions.
SMART WORKFLOW
STEP 1
pre-assignment and one-click
for a quick start
STEP 2
complete the task
independently
STEP 3
automatic berthing and simple
garbage collection
ADVANTAGES
Human Led Initiatives
Cost Reduction
Efficiency Improvement
Zero Emission
Easy to Use
Rich Cases
Promising Future
CASE

River Thames, United Kingdom

Barcelona, Spain

West Coast, Singapore

Khabur River, Iraq

Tunmen, Hong Kong

antwerp, Belgium





